AutoLane - dankzij innovatieve grondbewerking automatisch bergop


Bij grondbewerking worden tegenwoordig vaak tractoren met automatische rijspoorgeleiding gebruikt, die afhankelijk van de werkbreedte van de gedragen machine vaste A-B-lijnen of contouren kunnen rijden. De instelling van de A-B-lijnen gebeurt op basis van de werkbreedte en de montagepositie van de machine.
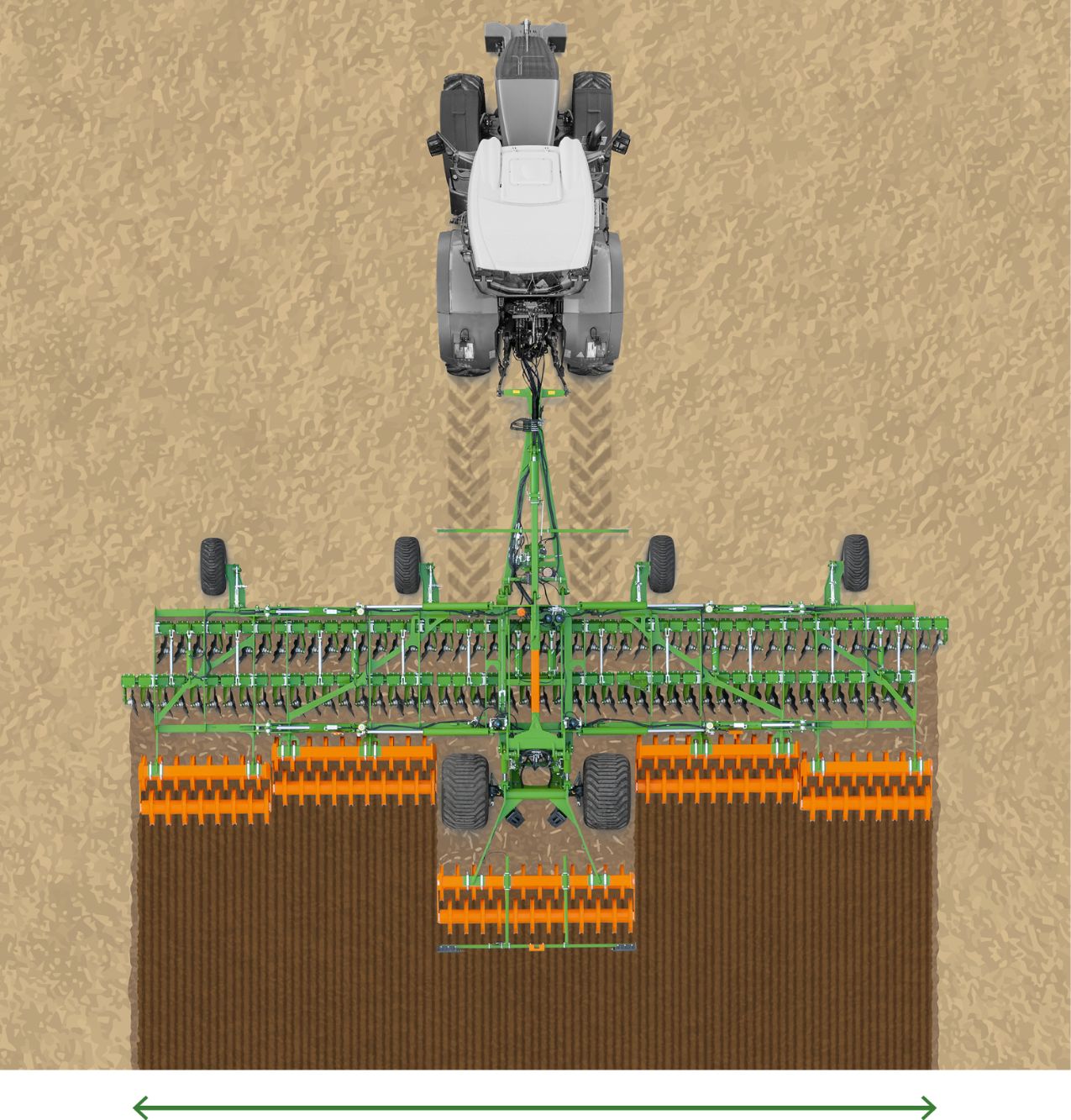
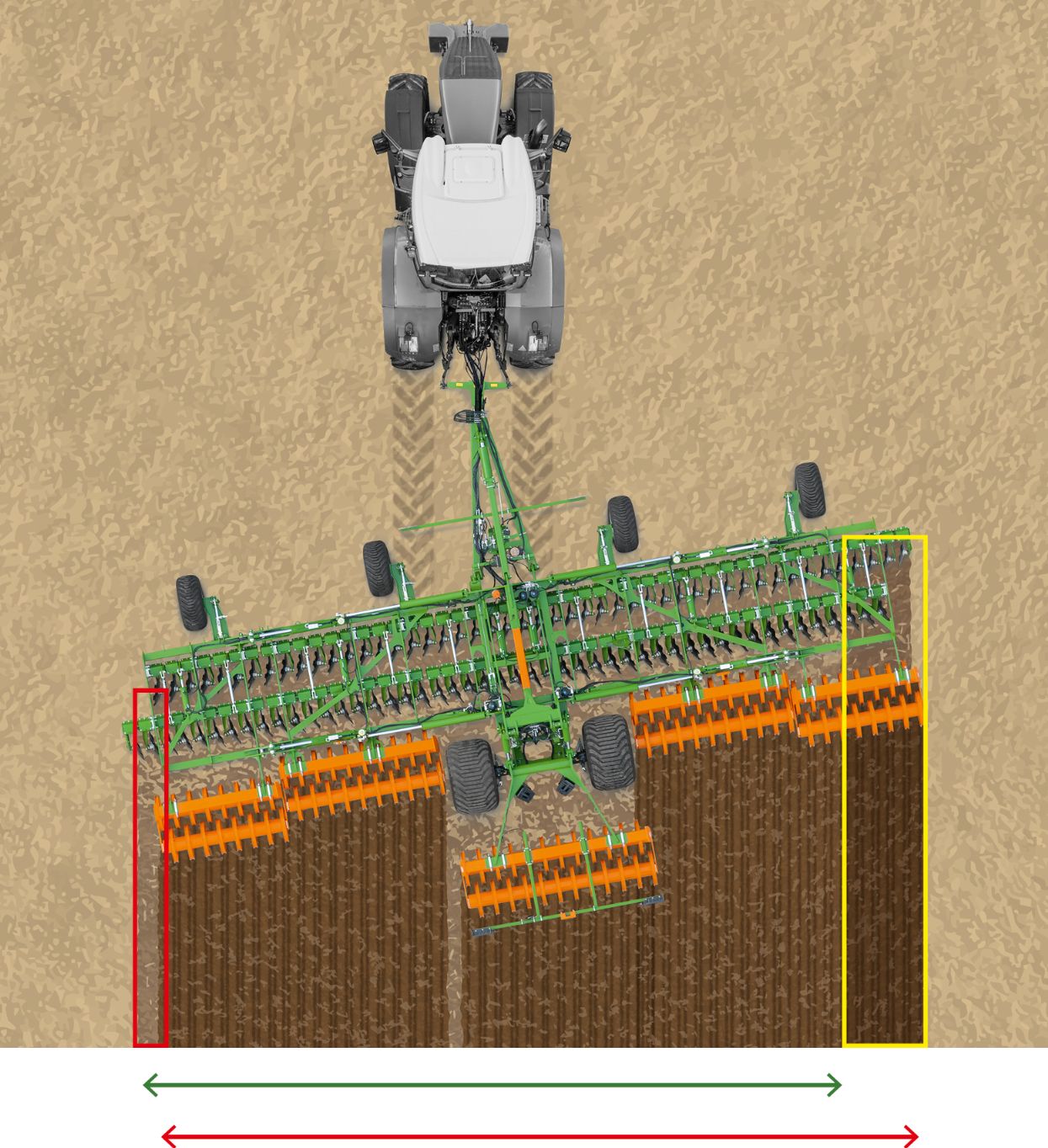
Hierbij wordt theoretisch aangenomen dat de machine op de helling recht achter de tractor loopt. De praktijk wijst uit dat met name bij getrokken grondbewerkingsmachines, zoals de compacte schijveneg, de machine op hellend terrein bergafwaarts en daarmee niet meer in het spoor van de tractor loopt.
Daardoor komt het daadwerkelijk bewerkte gebied niet overeen met het theoretische gebied in het rijspoorgeleidingssysteem, met als gevolg dat gebieden dubbel of helemaal niet worden bewerkt. Want de spoorverschuiving als gevolg van de neerwaartse kracht wordt in de praktijk meestal niet bij elke richtingsverandering gecorrigeerd. Bovendien is de hellingsgraad niet over de gehele lengte van een perceel gelijk. De verschillende drift wordt echter niet gecorrigeerd tijdens een spoor.
Ook het werkresultaat van de machine is niet optimaal, omdat de werktuigen bij scheef lopende machines niet optimaal op elkaar zijn afgestemd, waardoor de grond niet meer over het hele oppervlak wordt bewerkt. Als de machine scheef wordt getrokken, kan de tweede rij schijven precies in het werkbereik van de eerste rij lopen en blijft het tussenliggende gebied onbewerkt. Of de wals verdicht door de schuine verschuiving niet na op de plaats waar de schijven hebben gewerkt. Ongelijkmatige menging en naverdichting verhinderen een snelle en gelijkmatige opkomst van uitgevallen graan, verhogen de onkruiddruk en hebben daardoor een negatieve invloed op het volgende gewas.
Naast het hellend terrein kan ook de verschillende slijtage van de schijven van de eerste en tweede rij schijven tot een niet exacte spoorvolging leiden. De schijven van de eerste rij slijten doorgaans sneller, omdat deze schijven de nog onbewerkte grond als eerste werktuig bewerken en de tweede rij schijven in een reeds vooraf losgemaakte richting werkt.
Bovendien kan bij schijveneggen met een V-vormige schijfopstelling ook bij sterk wisselende bodems het probleem optreden dat deze niet altijd spoorvast achter de tractor lopen.
Bij een V-opstelling, zoals bij alle Amazone-schijveneggen, zijn de schijven van de eerste naar de tweede rij schijven tegengesteld geplaatst. Door de gelijkmatige plaatsing van de schijven per rij ontstaat een regelmatige schijfafstand over de hele werkbreedte. Daardoor wordt een constante werkkwaliteit ten opzichte van de X-opstelling over de hele werkbreedte gegarandeerd.
In principe betekent een niet exacte spoorvolging van de machine, ongeacht of dit op een helling is of bij sterk wisselende bodems op vlakke grond, een niet optimale treklijn van de tractor en derhalve een niet optimale krachtcurve van de combinatie.
Stand van de techniek
Bij getrokken compacte schijveneggen bestaat er momenteel geen effectieve technische oplossing om te voorkomen dat de machine bergafwaarts loopt. In sommige gebieden zijn er speciale hellingschijven die dit verschijnsel weliswaar beperken, maar niet kunnen voorkomen.
Om het probleem van overlapping en niet-bewerking bij het spoor-aan-spoor rijden op hellend terrein tegen te gaan, kan er met een extra GPS-ontvanger worden gewerkt, zodat het rijspoorgeleidingssysteem de A-B-lijn van de tractor kan aanpassen. Hierdoor wordt echter niet de schuine trekkracht van de machine gecompenseerd. Door de A-B-lijn naar het vorige spoor te verschuiven, wordt alleen een overlapping van de werksporen bereikt om geen gebieden onbewerkt te laten. Ook bij deze aanpak presteert de compacte schijveneg minder en is de treklijn niet optimaal.
Bestaande concepten, bijvoorbeeld met een X-opstelling van de schijven in 2 rijen, zorgen door een krachtbalans van de schijfopstelling voor een rechte loop zonder vrijwel zijdelingse krachten bij wisselende bodems op vlak terrein. Opvallend is dat schijveneggen met een X-opstelling rond het midden op en neer lopen en ook hier de werkelijke werkbreedte afwijkt van de theoretische. Om deze pendelbeweging te compenseren, moet ook hier een kleinere werkbreedte in het stuursysteem worden ingevoerd. Op hellingen kan de X-opstelling drift echter ook niet voorkomen.
De X-opstelling heeft als grote uitdaging om de tegengesteld geplaatste schijven per rij in het midden zo te plaatsen dat onder alle omstandigheden een werking over het hele oppervlak kan worden bereikt. Het gebied van de samenvoeging in het midden (rode driehoek) wordt meestal onvoldoende bewerkt, waardoor de menging, afhankelijk van de omstandigheden, vaak niet gelijkmatig is. De machine heeft een negatieve invloed op de grondstroom, wat afhankelijk van de bodemsoort als gevolg van de dwarsverdeling van grond en organisch materiaal kan leiden tot een ongelijkmatig werkresultaat achter het naloopwerktuig.
Het nieuwe AutoLane-systeem
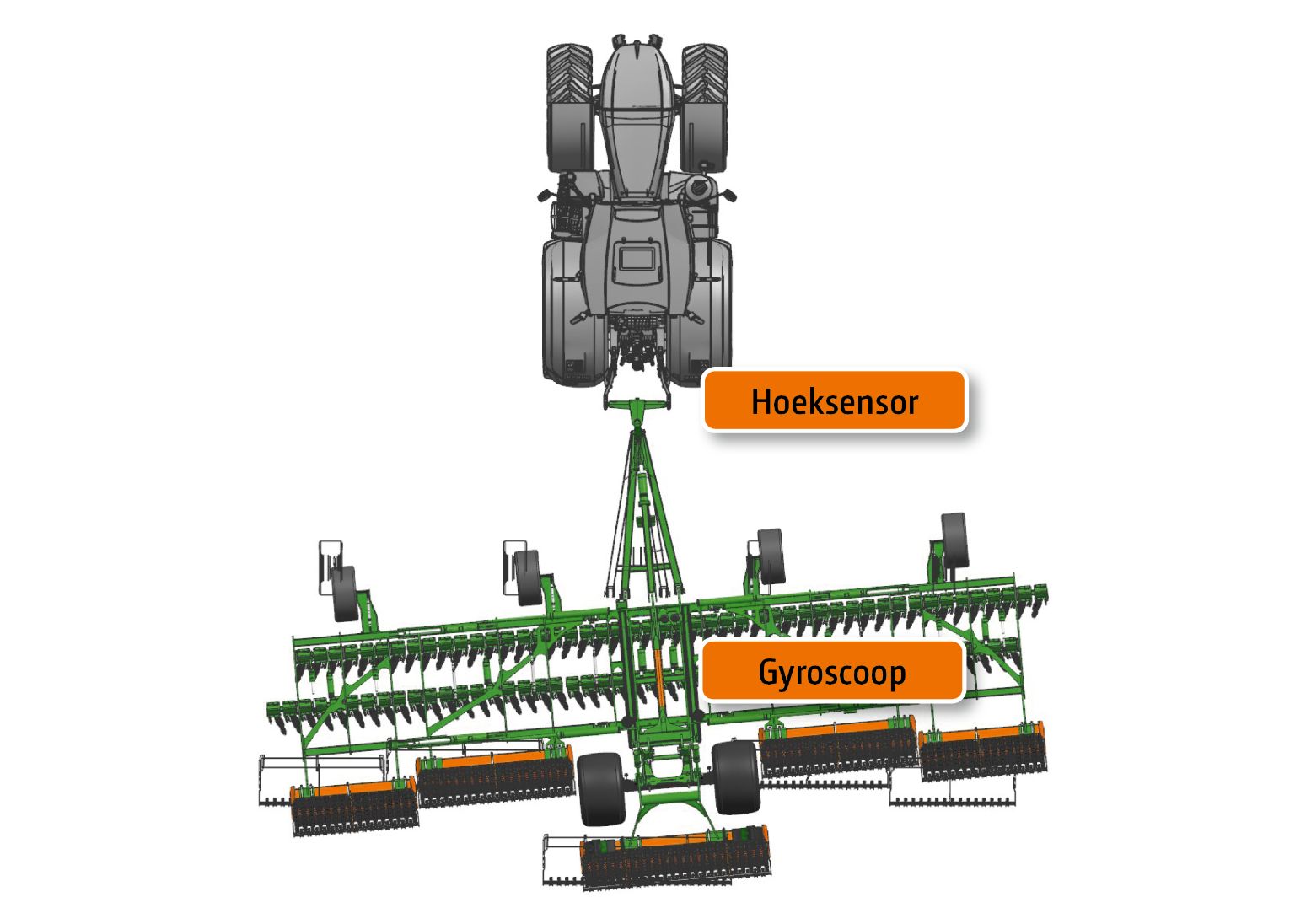
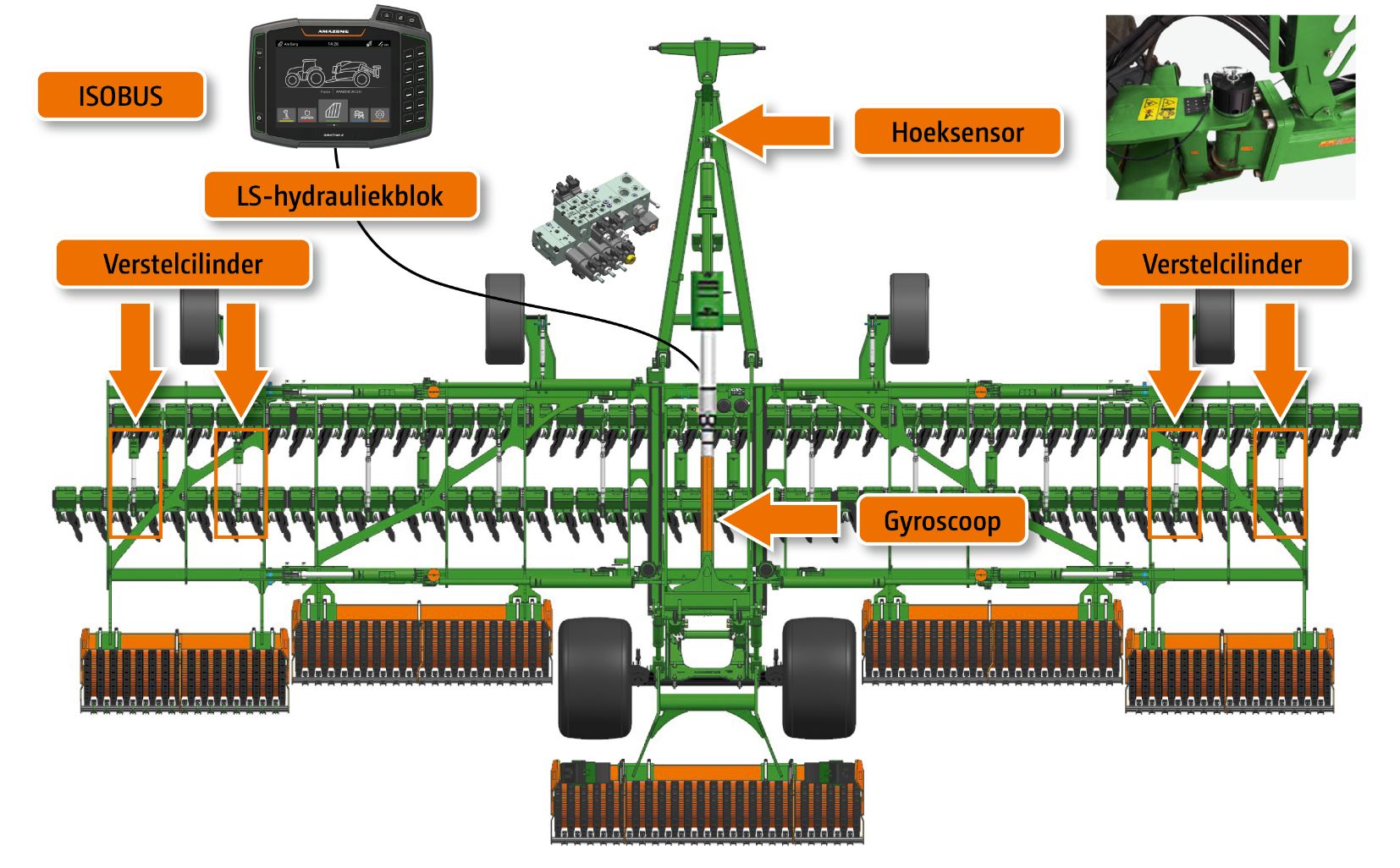
Om deze uitdaging aan te gaan, presenteert Amazone op de Agritechnica 2025 met AutoLane een nieuw, innovatief systeem dat de hellingsdrift van compacte schijveneggen compenseert en dubbele ritten en ontbrekende bewerkingsgebieden op hellingen en bij wisselende bodemomstandigheden compenseert. De verschuiving van de getrokken compacte schijveneg ten opzichte van de tractor wordt continu gemeten door een hoeksensor en in de Isobus-terminal AmaTron 4 verwerkt. De helling van de schijveneg op hellend terrein wordt daarbij door een gyroscoop geregistreerd voor een actieve positiemeting.
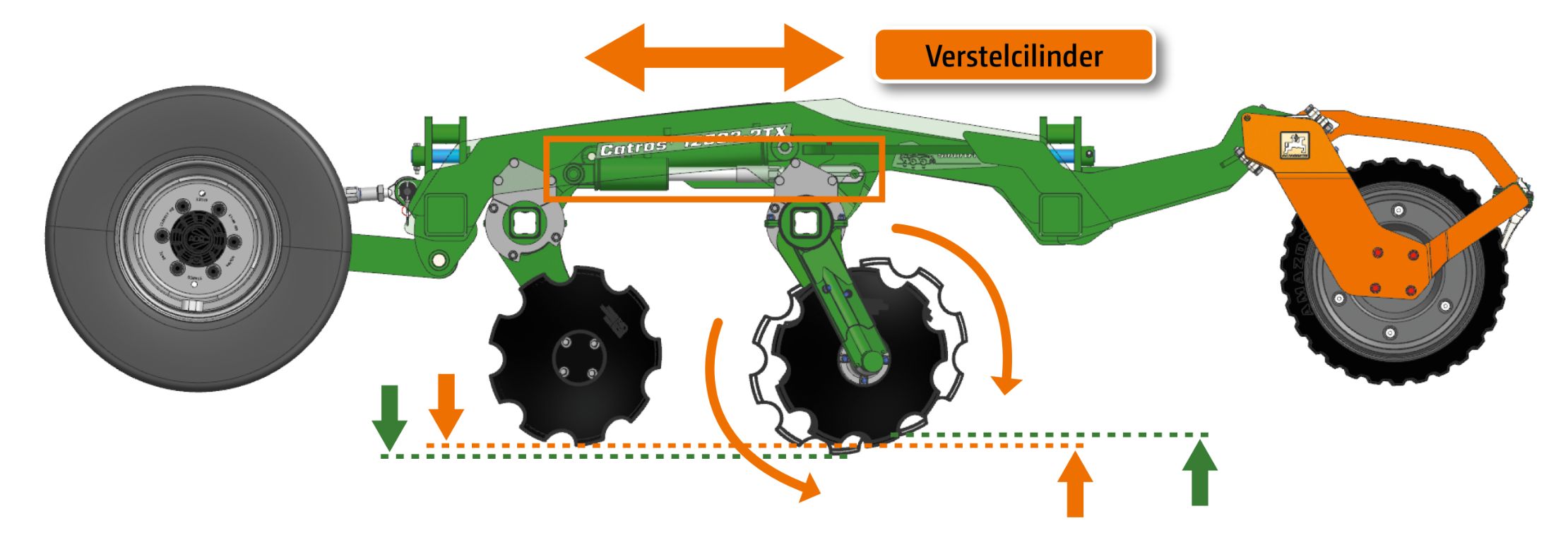
Op basis van een grafiek die de drift op hellingen beschrijft, wordt een gewenste hoek tussen de tractor en de schijveneg bepaald en door het systeem ingesteld. De afwijking van de gewenste hoek zorgt ervoor dat de achterste rij schijven wordt versteld, wat bij hellingsdrift een tegengestelde, bergopwaartse verplaatsing van de schijveneg tot gevolg heeft. Als de werkdiepte van de achterste rij minimaal wordt verhoogd, trekt de schijveneg naar links. Als de werkdiepte van de tweede rij schijven echter minimaal wordt verminderd, trekt de machine naar rechts. In de regel volstaat hier een minimale aanpassing van de rij schijven, zodat de invloed op het werkresultaat te verwaarlozen is. De verstelling van de rijen schijven ten opzichte van elkaar wordt mogelijk gemaakt door het beproefde Amazone SmartFrame. De toegestane slaglengtes van de verstelcilinders worden afhankelijk van de huidige werkdiepte beperkt. De integratie van elektrohydraulische componenten, diverse lagersensoren en hoeksensoren en de Isobus-besturing vormen de basis voor AutoLane van Catros-2TX.
De systeemgebonden verschillende slijtage van de schijven tussen de eerste en tweede rij schijven (eerste rij slijt sterker) kan met AutoLane ook worden gedetecteerd via de gewijzigde zijwaartse trekkracht. De spoorafwijking als gevolg van de versleten schijven wordt automatisch gecompenseerd.
- De Amazone compacte schijveneggen Catros-2TX lopen met AutoLane in uiteenlopende omstandigheden spoorvast achter de tractor. Het maakt daarbij niet uit of het een hellend terrein of extreem wisselende bodemomstandigheden betreft.
- Onbewerkte gebieden worden vermeden, uitgevallen graan wordt aangezet tot gelijkmatige ontkieming en de onkruiddruk voor volgende gewassen wordt gereduceerd. Extra maatregelen voor onkruidbestrijding kunnen worden beperkt.
- Structuurschade in de bodemstructuur evenals verlies van bodemwater door verdamping vanwege dubbele bewerking worden gereduceerd.
- Brandstof en werktijd worden bespaard en het slijtagegedrag wordt geoptimaliseerd.
- Spoorverschuiving door systeemgebonden, verschillend slijtagegedrag van de schijven van eerste tot tweede rij schijven wordt door AutoLane gedetecteerd en automatisch gecompenseerd.
- Sensorgestuurde, elektrohydraulische systemen bieden daarnaast de basis voor toekomstige volledig autonome werkprocessen, waarbij geen gebruiker directe invloed op het werkresultaat en het waarborgen van een constante werkkwaliteit hoeft uit te oefenen.
- AutoLane verhoogt door de automatische regeling het gebruiksgemak en is daarmee ook voor onervaren en ongetrainde bestuurders eenvoudig en gebruiksvriendelijk implementeerbaar.








Bron: Amazone